Dhruv Sharma
Aspiring Robotics Engineer
Class of 2021, Carnegie Mellon University

The aim of this project was to build an autonomous, Helium-filled balloon that can hover over areas of cargo ships and perform inspections for structural inconsistencies. Challenges ranged from choice of design and material for the blimp, to path planning and vision for inspections.
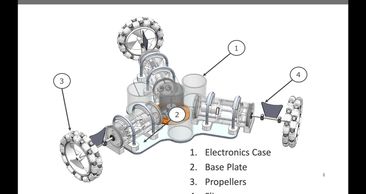
As part of Dr. Shimada's CERLAB, this project involved the ideation and construction of an autonomous robot, able to clean hulls and underbodies of ships, while staying reliably underwater. A prototype was developed and sent to field testing to partners, Tsuneishi Shipbuilding Co.

An Initial Guess Free Method is developed to estimate parameters in compartmental models of epidemiology. The method was then evaluated by fitting selected models to COVID-19 data. Further exploration involves other diseases and models, and fields such as machine learning.

I designed a mechanism powered by a servo motor, that can lift a 1-pound weight. The wall between the crane base and the weight, which the mechanism was not permitted to touch, compelled us to create an innovative design that is resistant to torsion and stress factors.

Designed an electromechanical system using an Arduino, as a speaker that plays
through aux inputs, allowing tunes to be played from mobile devices. Defaults to playing the ‘Mario’ soundtrack.

Designed small, mobile robots to achieve specific functionalities, using LEGO Mindstorm kits. Functions included, range-sensing, vision,, path-planning, localization, teleoperation, amongst others.
Ideated and fabricated a multiplayer pinball game, that simulates a 4-player soccer arena. With the usage of 3D printing, CNC for fabrication, and Arduino for the functionality, the final game was very compact and user-friendly.

Machined a mechanical gripper, powered by a motor, as part of the Design 1 project. The gripper was capable of lifting and transporting curved surfaces.
Created a multiplayer Teen Patti (Three Card Poker) game using Python and Sockets. Created an AI for allowing a single player